
Els lavabos públics intel·ligents són sistemes de detecció i control intel·ligents que es basen en la tecnologia Internet + Internet of Things per aconseguir diverses funcions en efectiu com ara orientació intel·ligent al vàter, monitorització ambiental intel·ligent, consum d’energia i gestió d’enllaços d’equips, funcionament i manteniment remot, que poden proporcionar serveis millors, més eficients, còmodes i còmodes per als usuaris de vàter.
01Sensors intel·ligents per ajudar a actualitzar els lavabos públics intel·ligents
En termes d’orientació intel·ligent al vàter, l’ús de sensors intel·ligents pot detectar elFlux total de passatgersiCapacitat de squat,i Aquestes dues dades es poden utilitzar a través de la pantalla interactiva a la zona pública, de manera que els usuaris i els gestors del vàter puguin veure intuïtivament l’ús de cada seient de vàter per a homes i dones, l’ús del tercer vàter i la sala de la mare i el nadó, i fins i tot proporcionar als gestors grans dades per predir la densitat del flux de persones i racionalitzar la gestió de la neteja.

Fig.
Tant pel trànsit de vàter total com per a l’ocupació en squat, podem millorar la precisió de les dades grans i millorar l’experiència de l’usuari final amb nous sensors intel·ligents que ho són
més precísi tenirPositius falsos mínims.

Fig.2 Diagrama esquemàtic de la detecció de squat del sensor intel·ligent de LiDAR
02 Comparació del rendiment de cada sensor
En l'actualitat, la major part de la detecció de squat utilitza panys tradicionals de portes intel·ligents o sensors d'infrarojos, mentre que la detecció del patrocini del vàter utilitza sensors d'infrarojos i càmeres 3D. Un nou tipus de detector làser, que es fa cada vegada més gran en el preu i l’ampliació de l’aplicació, pot aconseguir estadístiques de detecció i mecenatge amb una taxa de precisió superior al 99%. Aquí teniu un exemple de detector làser de Dianyingpu (R01 lidar) com a exemple, es compara el rendiment de diversos tipus de sensors que s'utilitzen principalment per a la detecció de l'oqui.
| Tipus de sensor | Panys de portes intel·ligents | Sensors infrarojos | Lidar |
|
|
| | |
| Instal·lat a les portes del vàter públic per determinar l’ocupació obrint i tancant la porta | Instal·lat per sobre del vàter per determinar el flux i l'ocupació dels passatgers mitjançant la mesura dels canvis de distància | Instal·lat per sobre del vàter per determinar el flux i l'ocupació dels passatgers mitjançant la mesura dels canvis de distància | |
| Avantatges | No hi ha falsos positius | No es requereixen modificacions addicionals Baix cost No fàcilment danyat | No es requereixen modificacions addicionals Sense falses alarmesNo hi ha restriccions a la distància d’instal·lació Identificació precisa dels objectes negres Sense falses alarmes |
| Desavantatges | Fràgil | Falsa alarma propensa | Cost lleugerament més elevat |



Taula I. Anàlisi dels punts forts i febles generals del rendiment del sensor
Per millorar la precisió de la detecció o la detecció del flux de passatgers, es requereixen sensors d’alt rendiment amb un rendiment estable i taxes d’alarma falses molt baixes. ElA continuació, es fa una comparació del rendiment de diversos sensors infrarojos i del Dianyingpu R01Sensors LiDAR.
Mesurat lluny
En municipis nous o reformats, llocs escènics, carreteres, aeroports i altres ocasions de lavabos públics intel·ligents, amb R01Sensors LiDARPer assolir la funció de detecció i flux de passatgers en squat, ja no estarà sotmès a les restriccions tradicionals d’alçada d’instal·lació del sensor d’infrarojos (el sensor d’infraroig general requereix el control d’alçada de la instal·lació dins de 2m, a l’interior sense una situació de llum ambiental forta).
R01Sensors LiDARProva preliminar d’objectes de diferents objectes de colors, inclosos objectes de color fosc, fins a una distància de més de 3 metres.Els sensors d’infrarojos convencionals només poden mesurar fins a uns 1 metres.
B.Precisióde mesura
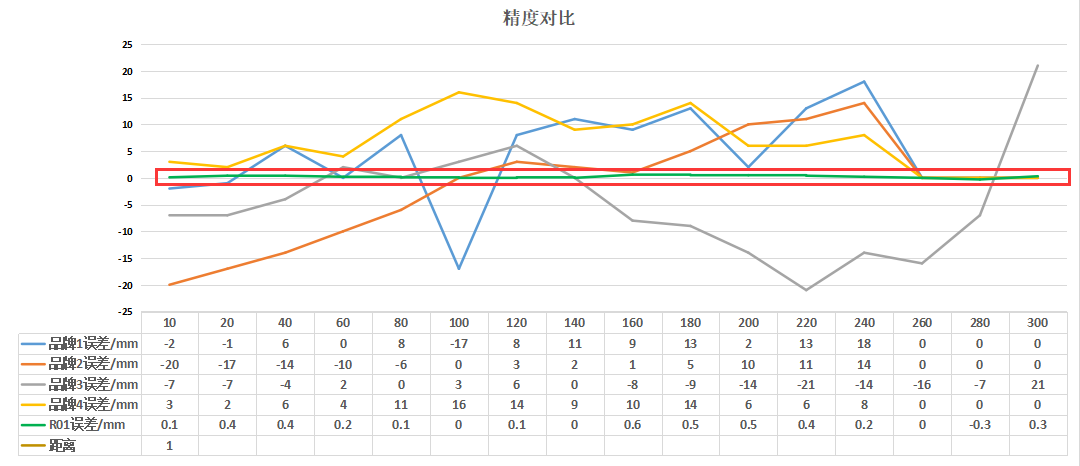
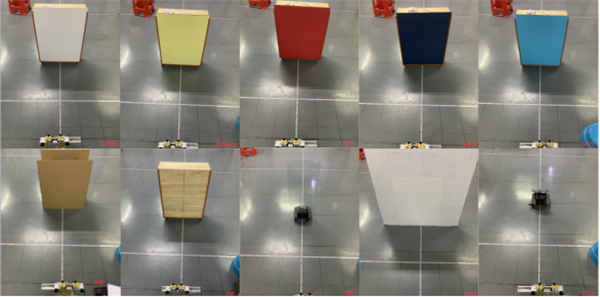
Quan s’utilitzen el vàter a l’interior, diferents altures dels clients, la roba i l’equip poden provocar canvis en la distància mesurada pel sensor a causa de diferents intervals, cosa que posarà a prova la precisió de la mesura de distància del sensor, és a dir, el valor d’error.
El gràfic anterior utilitza els resultats de les proves de precisió interiors mitjançant caixes de cartró planes, l’eix horitzontal és la distància estàndard, l’eix vertical és la distància d’error real,Prova diferents marques de sensors LiDAR,de la situació de fluctuació de dades, elAltres 4 marques dins del sensor de gamma 3Merrortégran fluctuació,La marca 1, 2, 4 fins i tot de 260cm en endavant no pot provar les dades. ElR01LiDAR, per la seva banda, gairebé no tenia valors d'error dins delRange 3M,amb unInterval màxim de 440cm.
Assumeix un escenari relativament extrem però possible: un nen de només 1 m d’alçada, el sensor s’instal·la a una alçada de 2,6 m, el nen pot moure el cos cap endavant i cap endavant després de la gamma, l’interval de mesurament es troba en el rang d’1,9-2,1 m, si les dades mesurades pel sensor fluctuen molt, la probabilitat que l’alarma falsa es farà elevada, afectant el client a enganyar-se a la marge de la disposició.
0R01Avantatges generals de LiDAR
Detecció de distància ultra-llarga:4mDistecció de detecció, detecció precisa sense falses alarmes ni detecció perduda
Sense por al medi:Nou actualització de l'algoritme a OptimizE Mesura en fons de reflectància a l'aire lliure/d'alta llum/complex
S’adapta als escenaris de baixa potència:Admet el mode de baixa potència, per sota dels 100 MW, el corrent màxim significatiu, més amable amb el sistema d’alimentació
Baix cost:Preu de la mostra6 dòlars cadascunEls ordinadors, el preu massiu és més favorable
Posat Post: 23 de novembre de 2012