
Segons les estadístiques de la nova estratègia Institut de la indústria de conducció no tripulada, es van revelar més de 200 esdeveniments de finançament importants a la indústria de conducció autònoma a casa i a l'estranger el 2021, amb un import total de finançament de prop de 150 mil milions de iuans (inclosa la OIP). A l’interior, gairebé 70 esdeveniments de finançament i més de 30 mil milions de iuans van ser criats per proveïdors de productes i solucions no tripulats de baixa velocitat.
En els darrers dos anys, han sorgit escenaris de lliurament no tripulats, neteja no tripulats i escenaris d’aterratge d’emmagatzematge no tripulats, i la forta entrada de capital ha empès vehicles no tripulats al “carril ràpid” del desenvolupament. Amb el desenvolupament de la tecnologia de fusió de sensors de diversos models, els representants pioners han entrat a l’equip “professional”, realitzant diverses tasques com la neteja de carreteres, la publicació i l’expressa, el lliurament d’enviament, etc.

Vehicles de neteja no tripulats per treballar
Com a “vehicle vocacional futur” que substitueix la mà d’obra, les solucions d’evitació d’obstacles aplicades no han de ser descontents per guanyar a la indústria emergent, i el vehicle ha de ser poderós segons l’escenari de treball, com ara el vehicle no tripulat a la indústria del sanejament hauria de tenir la funció de la identificació de les accions; amb la funció d’evitació d’obstacles segurs en la indústria de l’entrega; amb la funció de la funció d’evitació del risc d’emergència a la indústria d’emmagatzematge ...
- Indústria del sanejament: una trinitat de detings intel·ligents squímic

Indústria del sanejament: es presenta la trinitat de l'esquema de detecció intel·ligent
El robot de sol "netejador" de l'Olympic de l'Olímpic de Beijing, utilitza una trinitat de l'esquema de detecció intel·ligent, equipat amb 19 radars d'ultrasons, que permet al robot tenir evitació d'obstacles integrals, prevenció de desbordament i funcions anti-boletes
All-roundEvitació d’obstacles
La part posterior està equipada amb 2 radars ultrasònics per a la inversió i l'avís d'obstacles, 3 radars ultrasònics sota la part frontal i 6 radars ultrasònics als costats per a les funcions d'avançament i evitació d'obstacles horitzontals, verticals i oblics.
Prevenció de desbordament
Instal·leu un sensor a la part superior de l’àrea de càrrega del vehicle per adonar -se de la funció del control de la situació de càrrega i assegureu -vos que la capacitat de càrrega compleixi els estàndards de seguretat.
Anti-dumping
Evita que la secció dividida s’enfonsi a causa de les forces externes en un estat no carregat o poc carregat, posant en perill la seguretat pública.
- Indústria de lliurament:comprensiuEvitació d’obstacles intel·ligents squímic
Indústria de lliurament: demostració parcial de l'esquema d'evitació d'obstacles intel·ligents integrals
En comparació amb la logística de llarg recorregut, el nucli de l'escenari de la indústria de lliurament es troba en una gran freqüència i alta freqüència, cosa que significa que els vehicles de lliurament no tripulats han de ser dissenyats per ser més flexibles i segurs per fer front a escenaris urbans complexos, com ara la construcció de la construcció i la evitació d'obstacles de la zona. DYP ha proporcionat un programa integral d’evitació d’obstacles intel·ligents a la tecnologia de zhixing, fent que el seu producte es converteixi en un vehicle de lliurament no tripulat per ser provat en un entorn semi-obert a la Xina.
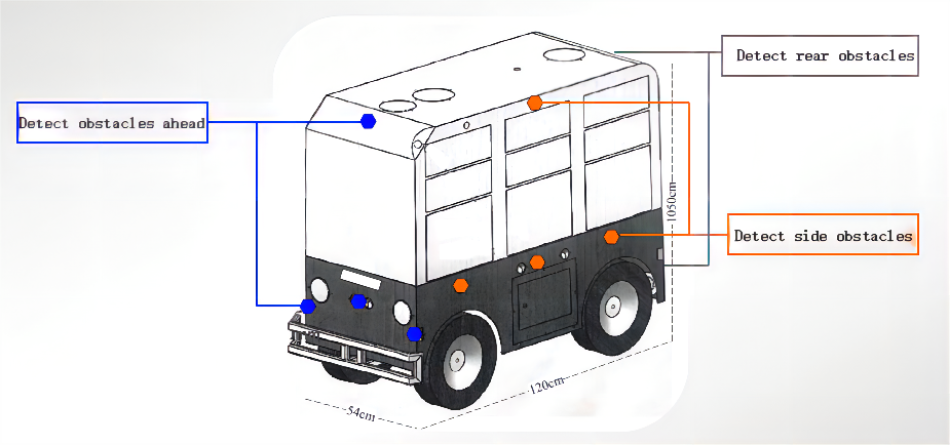
Evitació d’obstacles frontals i posteriors
Un radar ultrasònic està equipat a la part superior de la part frontal i posterior per detectar obstacles més alts, com ara els pols de restricció d'alçada; Tres radars ultrasònics estan equipats a la part inferior de la part frontal i posterior per detectar obstacles laterals baixos i frontals, com ara els pals de restricció. Al mateix temps, els radars ultrasons als extrems frontals i posteriors poden assegurar el vehicle no tripulat per invertir o girar.
Evitació d’obstacles laterals
Un radar ultrasònic està instal·lat per sobre de cada costat per detectar obstacles laterals alts i ajudar a activar la funció de lliurament express; S’instal·len tres radars ultrasònics a sota de cada costat per detectar obstacles laterals baixos com ara les vores de la carretera, els cinturons verds i els pals de peu. A més, els radars d’ultrasons dels costats esquerre i dret poden trobar la “plaça d’aparcament” dreta per al vehicle no tripulat i completar l’aparcament automàtic amb èxit.
- Indústria d’emmagatzematge: evitació d’emergència i ruta optimizstion squímic

Diagrama d’evitació d’obstacles AGV
Els vehicles no tripulats del magatzem comú es posicionen per a la planificació de camins locals mitjançant solucions de tecnologia d’infrarojos i làser, però tots dos es veuen afectats per la llum en termes de precisió i es poden produir riscos de col·lisió quan diversos carros creuen camins en un magatzem. Dianyingpu proporciona solucions d’evitació de riscos d’emergència i d’optimització de rutes per a la indústria de magatzem que no es veuen afectades per la llum, utilitzant un radar ultrasònic per ajudar el magatzem AGV a assolir l’evitació d’obstacles autònoms en els magatzems, un aparcament oportú i precís en moments de crisi per evitar col·lisions.
Emergènciaevitació
Quan el radar ultrasònic detecta un obstacle entra a la zona d’avís, el sensor alimentarà la informació d’orientació de l’obstacle més proper al carro no tripulat al sistema de control AGV a temps i el sistema de control controlarà el carro per frenar i frenar. Per a aquells obstacles que no siguin a la zona de davant del carro, fins i tot si estan a prop, el radar no avisarà per assegurar l'eficiència del carro que funciona.
Ruta Optimizcacció
El vehicle no tripulat utilitza el núvol de punts làser combinat amb el mapa d’alta precisió per a la planificació de camins locals i obtenir diverses trajectòries a seleccionar. A continuació, la informació d’obstacles obtingudes per ultrasons es projecta i es calcula a l’esquena al sistema de coordenades del vehicle, les trajectòries obtingudes que s’han de seleccionar es filtren i es corregeixen, finalment es deriva la trajectòria òptima i el moviment endavant es basa en aquesta trajectòria.

- Capacitat de rang fins als 5 m,punt cec tan baix com 3cm
- estable, no afectat per la llum iColor del mesurat fer objeccions
- Alta fiabilitat, Coneix elRequisits de la classe de vehicles
Hora del post: 30-2022 d'agost