
Selon les statistiques de la nouvelle stratégie sans pilote Institute de l'industrie de la conduite, plus de 200 événements de financement importants ont été divulgués dans l'industrie de la conduite autonome au pays et à l'étranger en 2021, avec un montant total de près de 150 milliards de yuans (y compris l'introduction en bourse). À l'intérieur, près de 70 événements de financement et plus de 30 milliards de yuans ont été élevés par des fournisseurs de produits et de solutions sans pilote à basse vitesse.
Au cours des deux dernières années, la livraison sans pilote, le nettoyage sans pilote et les scénarios sans pilote de stockage ont vu le jour, et la forte entrée de capital a poussé les véhicules sans pilote dans la «voie rapide» du développement. Avec le développement de la technologie de fusion de capteurs multimode, les représentants pionniers sont entrés dans l'équipe «professionnelle», effectuant diverses tâches telles que le nettoyage des routes, la publication et l'expression, la livraison d'expédition, etc.

Véhicules de nettoyage sans pilote en travaillant
En tant que «futur véhicule professionnel» qui remplace la main-d'œuvre, les solutions d'évitement des obstacles appliquées ne doivent pas être bâclées pour gagner dans l'industrie émergente, et le véhicule doit être habilité en fonction du scénario de travail, tel que le véhicule sans pilote dans l'industrie de l'assainissement devrait avoir la fonction de l'identification des stocks; avec la fonction de l'évitement sûr des obstacles dans l'industrie de la livraison; Avec la fonction de la fonction d'évitement des risques d'urgence dans l'industrie du stockage ……
- Industrie de l'assainissement: une trinité de détection intelligente Schérir

Industrie de l'assainissement - Trinité du schéma de détection intelligent présenté
Le robot de Sunlela Sunlela Sunlela Sunlela Sunlela Sunlela Sunlela de Beijing Winking Olympic, utilise un schéma de détection intelligent, équipé de 19 radars ultrasoniques, permettant au robot d'avoir des fonctions d'obstacle complet, de prévention du débordement et antidumping
Alinévitement des obstacles
L'arrière est équipé de 2 radars à ultrasons pour inverser la surveillance et l'avertissement des obstacles, 3 radars ultrasoniques sous les radars avant et 6 ultrasons sur les côtés pour les fonctions de progression et d'évitement des obstacles horizontales, verticales et obliques.
Prévention du débordement
Installez un capteur en haut de la zone de chargement du véhicule pour réaliser la fonction de surveillance de la situation de chargement et assurez-vous que la capacité de chargement répond aux normes de sécurité.
Antidumping
Empêche la section fendue de basculer en raison des forces externes dans un état non chargé ou sous-chargé, mettant en danger la sécurité publique.
- Industrie de la livraison:completÉvitement des obstacles intelligents schérir
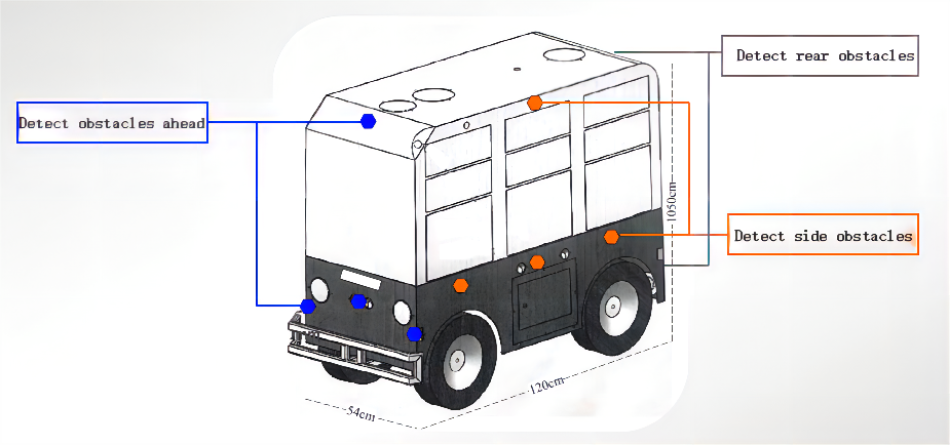
Industrie de la livraison - Démonstration partielle d'un régime complet d'évitement des obstacles intelligents
Par rapport à la logistique long-courrier, le cœur du scénario de l'industrie de la livraison se situe dans le court-courrier et la haute fréquence, ce qui signifie que les véhicules de livraison sans pilote doivent être conçus pour être plus flexibles et plus sûrs pour faire face à des scénarios urbains complexes, tels que la navigation de la navette et l'évitement des obstacles. DYP a fourni un schéma complet d'évitement des obstacles intelligents à la technologie Zhixing, ce qui fait tester son produit sans pilote à tester dans un environnement semi-ouvert en Chine.
Évitement des obstacles avant et arrière
Un radar à ultrasons est installé en haut de l'avant et à l'arrière pour détecter des obstacles plus élevés, tels que les pôles de restriction de hauteur; Trois radars à ultrasons sont installés au bas de l'avant et de l'arrière pour détecter les obstacles bas et avant, tels que les pôles de restriction. Dans le même temps, les radars à ultrasons aux extrémités avant et arrière sont capables de fixer le véhicule sans pilote pour inverser ou tourner.
Évitement des obstacles latéraux
Un radar à ultrasons est installé au-dessus de chaque côté pour détecter les obstacles latéraux élevés et aider à activer la fonction de livraison express; Trois radars à ultrasons sont installés sous chaque côté pour détecter les obstacles latéraux bas tels que les bords de la route, les ceintures vertes et les poteaux debout. De plus, les radars à ultrasons sur les côtés gauche et droite peuvent trouver le bon «espace de stationnement» pour le véhicule sans pilote et terminer le parking automatique avec succès.
- Industrie du stockage: évitement d'urgence et optimitationzation schérir

Diagramme de l'évitement des obstacles AGV
Les véhicules à entrepôt communs sont positionnés pour la planification de la voie locale à travers des solutions de technologie infrarouge et laser, mais les deux sont affectées par la lumière en termes de précision, et les risques de collision peuvent se produire lorsque plusieurs chariots se croisent dans un entrepôt. DianyingPu fournit des solutions d'urgence d'évitement des risques et d'optimisation des itinéraires pour l'industrie de l'entreposage qui ne sont pas affectées par la lumière, en utilisant un radar à ultrasons pour aider l'entrepôt AGV à réaliser un évitement des obstacles autonomes dans les entrepôts, un stationnement en temps opportun et précis en cas de crise pour éviter les collisions.
Urgenceévitement
Lorsque le radar à ultrasons détecte un obstacle entre dans la zone d'avertissement, le capteur alimentera les informations d'orientation de l'obstacle le plus proche du chariot sans pilote au système de contrôle AGV à temps, et le système de contrôle contrôlera le chariot pour ralentir et freiner. Pour ces obstacles qui ne sont pas dans la zone avant du chariot, même s'ils sont proches, le radar n'arrivera pas pour assurer l'efficacité du travail du chariot.
Route Optimization
Le véhicule sans pilote utilise le nuage de points laser combiné avec la carte de haute précision pour la planification du chemin local et obtenir un certain nombre de trajectoires à sélectionner. Ensuite, les informations d'obstacle obtenues par échographie sont projetées et calculées en arrière dans le système de coordonnées du véhicule, les trajectoires obtenues à sélectionner sont encore filtrées et corrigées, enfin la trajectoire optimale est dérivée et le mouvement vers l'avant est basé sur cette trajectoire.

- Capacité de portée jusqu'à 5m,Pertucule aveugle aussi bas que 3 cm
- stable, non affecté par la lumière etcouleur du mesuré objet
- Fiabilité élevée, rencontrez leExigences de classe de véhicules
Heure du poste: 30 août-2022