
Бо рушди технологии роботҳои хидматрасонӣ, ҳавзаи шиноварӣ тоза кардани роботҳо дар бозор ба таври васеъ татбиқ карда мешаванд. Бо мақсади амалӣ намудани хатсайрҳои автоматии худ, ки хароҷот ва мутобиқшавӣultrasonicҶасоратҳо аз сенсорҳои монеаҳо ноустувор мебошанд.
ВасеъБозор
То имрӯз, Амрикои Шимолӣ ҳоло ҳам бузургтарин бозор дар рушди бозори ҷаҳонӣ (гузориши бозори Техно оид ба бозори Техно, 2019-2024). Аллакай зиёда аз 10,7 миллион ҳавзи шиноварӣ дар Иёлоти Муттаҳида ва шумораи ҳавзҳои нав вуҷуд дорад ва ҳавзҳои нави хусусӣ пас аз сол меафзояд, ки 117,000 дар соли 2021 ба ҳисоби миёна як ҳавз барои ҳар 31 нафар. Дар Фаронса, дуввуми бузургтарин бозори калонтарин дар тамоми ҷаҳон зиёда аз 3,2 миллион соли 2022-ум зиёд шудааст
Дар бозори Чин, ки дар ҳавзҳои шиноварии ҷамъиятӣ бартарӣ дорад, ба ҳисоби миёна тақрибан 43,000 нафар толори варзишӣ ва дар кишвар 32,500 ҳавзи шиноварӣ дар кишвар, ки дар асоси аҳолии 1,4 млрд.
Испания чорум аз баландтарин аксари ҳавзҳои шиноварӣ дар ҷаҳон ва дуввуми ҳавзҳои шиноварӣ дар Аврупо, бо 1,3 миллион ҳавзи шиноварӣ (истиқоматӣ, ҷамъиятӣ ва коллектив).
Аз муқоисаи бозори ҷаҳонӣ - Чин Ҳаҷми бозори бозор дар бозори Чин камтар аз 1% дунё камтар аст, бозори асосӣ ҳоло ҳам Аврупо ва Иёлоти Муттаҳида аст. Маълумот нишон медиҳад, ки дар соли 2021 андозаи бозори глобалии ролотаи глобалии ролотаи глобалии РОКАТ, фурӯши зиёда аз 1,6 миллион адад, танҳо канали онлайн. Ҳавзаи шиновар дар 202,000 адад ба зиёда аз 521.
Дар айни замон, бозори тозакунандаи ҳавз ҳанӯз дар сатҳи тоза кардани дастӣ ва дар бозори ҷаҳонии шиновар дар бозори глобалии шиноварӣ дар бораи 45%, ҳангоми шинондани ҳавзаи тозакунии роботҳо дар тӯли 19% мебошад. Дар оянда, бо афзоиши хароҷоти меҳнат ва паҳншавии технологияҳои саноат, ба монанди дарки визуалӣ оҳиста, дарки бодиризатсия, Интернети ултрасадо, ба нақша гирифтани сатҳи паҳншавии ҳавз, ки роботҳои тозакунандаи ҳавзро такмил медиҳанд, минбаъд такмил дода мешаванд.
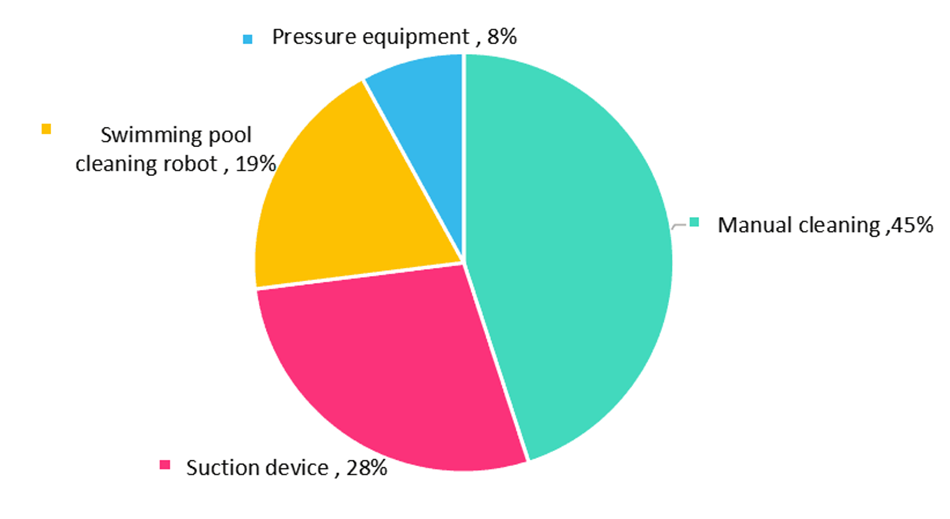
Ҳавзаи глобалии шиноварӣ тоза кардани сатҳи воридшавии бозор дар соли 2021
Санҷиши қобили қабул, сенсорҳои зериобӣ кӯмак мекунандшино карданРобот тоза кардани пашм барои пешгирӣ кардани монеаҳо оқилона
Барномаҳои андозагирии ултрасадо дар масофаи дурнамо пешгирӣ кунед Сенсор Технологияи андозагирии сатҳи обии ултрасадоӣ барои чен кардани масофаи байни сенсор ва объекти андозагиришаванда истифода мебарад. Вақте ки сенсор монеаро коҳиш медиҳад, масофаи монеа ба робот бармегардад ва робот метавонад ба девор насб карда шавад, то деворро ба таври худкор тоза кунед, ҳавзи шиноварӣ ва монеъиро пешгирӣ кунед.
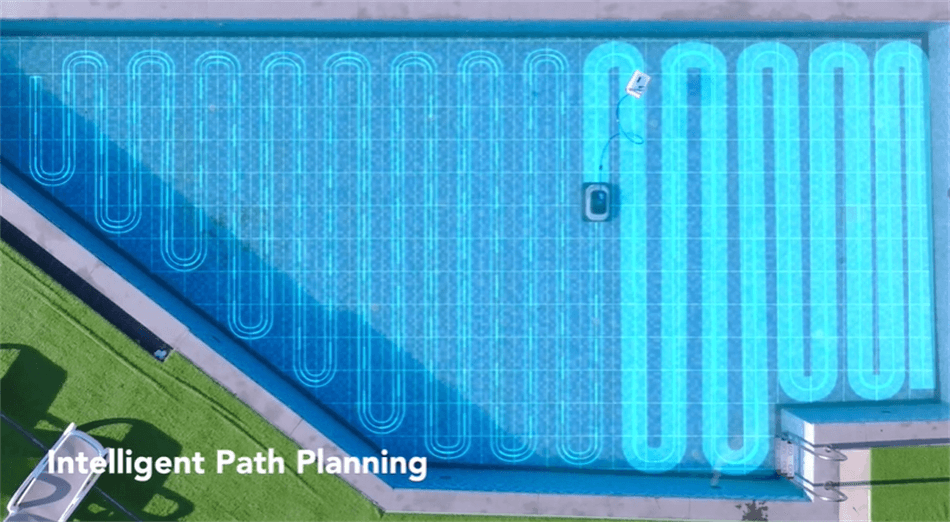
Тарҳбандии пешгирии сенсори DSP, таҳқиқоти мустақил ва таҳқиқоти сенсидияи ошкоро ба воситаи танзимоти контексти зериобӣ, то робати ҳавзаи тозакунии ҳавзаи тозакунанда аз фаъолияти роҳи банақшагирӣ дорад.
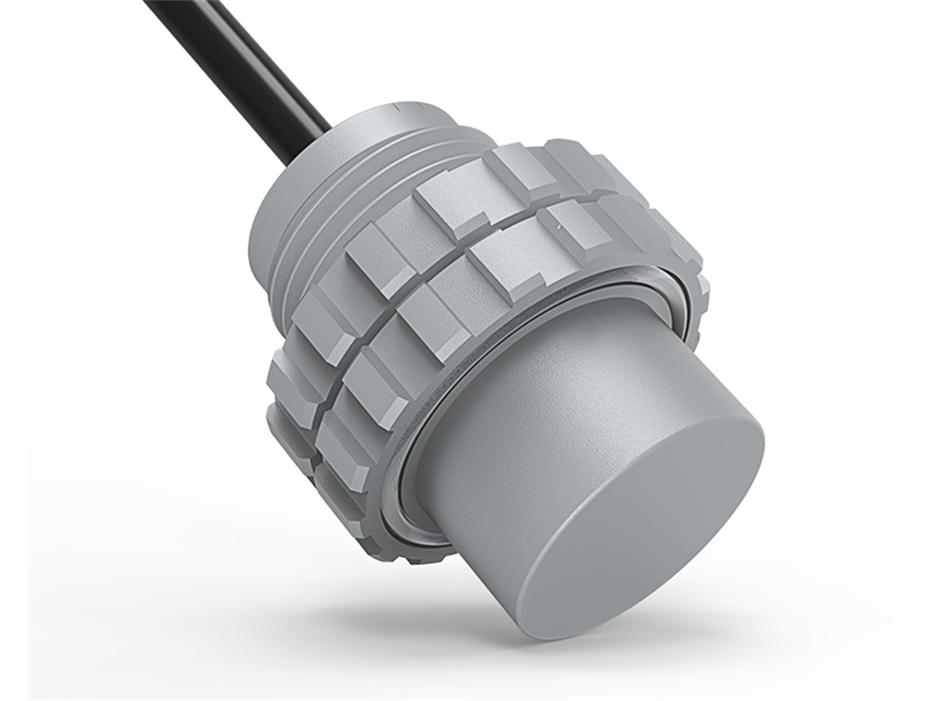
L08-Module як сенсози монеаи истилоҳҳои истиқоматии обанборест, ки барои барномаҳои обтаъминкунӣ пешбинӣ шудааст. Он бартариҳои андозаи хурд, минтақаи кӯр, минтақаи кӯр, сатҳи баланд ва хуби обро дорад. Протоколи MODBUS.SENESS ДИГАР МЕГӮЯД, Намунаи гуногун ва Нишонаҳои минтақаи нобино барои эҳтиёҷоти гуногуни корбарон барои интихоб.
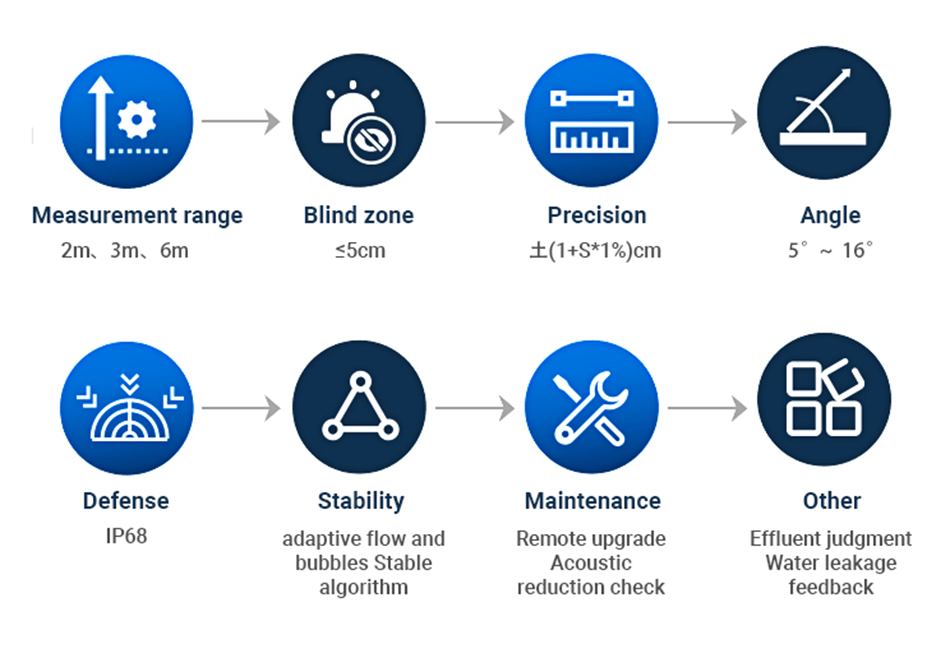
Параметрҳои асосӣ:
Мадад ба нуқтаҳои дард, навоварӣ ва шикастани
Чӣ гуна беҳтар аст, ки роботи тозакунандаи ҳавопаймои тозакунандаи ҳавопаймои обдорро тавассути обкашии таҳқиқот ва таҳқиқоти пурраи технологӣ, ки аз таҳқиқоти амиқ равона карда шудааст, ба нуқтаҳои дарди бозор равона карда шудааст, ки аз он халал намоем.
(1) Арзиши баланд ҳеҷ роҳе барои таҳкими истифодаи маҳсулоти истеъмолӣ вуҷуд надорад: Сенсномаҳои ошкорбии дар хона фурӯхта ва дар хориҷа, нархҳо ба роботҳои истеъмолии арзиши пул ҳассос мебошанд, аз ин рӯ ба онҳо васеъ истифода бурда намешаванд.
Якҷоя бо арзиши хароҷоти мақсадноки истеъмолкунандаи истеъмолкунандагони зери об, ки мустақилона таҳқиқ карда шуда ва ба параметрҳои мувофиқ, маҳаллисозии масолеҳи асосӣ ва таҷрибаи истеҳсоли оммавӣ таҳия шудааст. Арзиш камтар аз 10% аз саноат кам шуд, чун пешравикунонӣ дар электроникаи истеъмолӣ қабули санҷишҳои зери об.
(2) мутобиқати пасти параметрҳои сенсор дар бозор: Сенсор хеле дур аст, минтақаи нобино хурд аст ва парвандаи мувофиқ дар бозор дастрас нест ва арзиши омезиш баланд аст.
Табодули дуҷонибаи сершуморро таҳия кард, ки параметрҳои баландсифати масофа, минтақаи кӯр ва кунҷро ҳал мекунад.
①the Кунҷи мулоими қуттӣ то 90 ° наздик аст, ва мутобиқати нобино дар тӯли 5 см пешвоз мегирад ва мутобиқати сенарияҳои барнома хеле баланд аст.
② Маводи асосии санҷандаи ултрасадо трансистронии зарбаҳои Certricic аст, кунҷи сабти керамиро паст мекунад, кунҷи андозагирии зарфҳои радиоӣ аст, басомади ченакҳо баланд аст, воридшавӣ қавӣ аст, ки ба масофаи ченкунӣ қавӣ аст, масофаи ченак қавӣ аст параметрҳои минтақаи ноболиғ ба назар гирифта мешаванд.
(3) Дар муҳити мураккаби зериобӣ ноустувор аст: вақте ки оби калони об мавҷуд аст, алафи калони обии офтобӣ, маълумоти сенсорӣ аслан ноком мешавад, дар натиҷа ба робот амалиётро оқилона доварӣ намекунад.
Масъалае, ки дар маҷмааи мураккаби обанбор истифода мешавад, бо маҷмӯи сироятии алгориҳо ва мутобиқати алгоритил ва коркарди филтри Kalman истифода мешавад. Таҳияи бартариҳои басомадҳои мухталиф, ронандаи оқилонаи дилҳамзаи дилбу шумо, диверсификатсияи моддаҳои корӣ, қувват, сифати сигнал метавонад ба тағироти саҳна метавонад мутобиқ бошад.
Сохтори маҳсулот ва раванд:
1) Иншоот дар намуди зоҳирӣ содда аст, андозаи хурд, насб танҳо барои мустаҳкам кардани чормағз, ки дар бораи таҷҳизоти муҷозоти пурраи таҷҳизот пайваст карда шудааст; Пештар нигоҳдории баъдан бояд ба як чормағз табдил ёбад, ки сенсор, амалиёти оддиро, ки арзиши омӯзишии насб ва нигоҳдорӣ коҳиш диҳад.
(2) Раванди маҳсулот, трансгукер Технологияи ғайритиёздоре, ки технологияи вайроншударо истифода мебарад, сохтори ҳамаҷонибаи пӯшидашуда истифода мекунад. Расишҳои дохилии Pottine Pottining Pottin-ро ба таври пурра парпечшудаи кликҳои эпоксинро истифода мебарад, обфаҳои об метавонад ба сатҳи IP68 расад.
Тадщищотманазхудиёнlyвафунксияи боэътимод
Дар раванди таҳияи сенсор, дастаи R & D параметрҳои бисёрҷониба ва тақвияти мутарам намудҳои беҳтаршуда, ба монанди устувории маълумот, таъсироти об, басомадҳо ва истеҳсолот. Ва гузаронидашуда санҷишҳои гуногунҷанба бо шароити воқеии кории ҳавзаи тозакунандаи ҳавз ба беҳтар шудани робот барои минбаъдаи беҳтар кардани мутобиқсозии сенсорӣ ба муҳити зист ва шароити кор.
Ҳамзамон, Dianypu ҳамеша технологияи дар зери обро дар муқоиса бо тарроҳӣ ва баҳс, истеҳсолот ва калибрченкунӣ, ҳамоҳангсозии маҷмӯи пурраи санҷиш ва калибризатсияро таҳия кардааст.
Дар асоси системаи тестӣ ва калибркунанда, сенсор санҷиши эътимоднокии ба монанди санҷиши бад ва намӣ, санҷиши гармшудаи бараҳна, санҷиши гармкардашуда, санҷиши гармшудаи улайк, санҷиши фишори улайк, ки дар ҳар як экрейи прототита гузаронида мешавад.
Пас аз сенсор бо мақоми робот, иҷрои тамоми мошин барои ҳазорҳо соат дар якҷоягӣ бо муҳити воқеии робот санҷида мешавад. Ҳосилнокии ин сенсор дар истеҳсоли оммавӣ аз 99% зиёд аст, ки таҷрибаи бозории истеҳсолоти партияро тасдиқ кардааст.
Ҷамъоварӣ, L08 идома хоҳад ёфтнавсозӣ
Баррасии роҳи рушди сенсорҳои зериобӣ: таҳқиқ, ҳамгироӣ, навоварӣ, санҷиш. Ҳар як гиреҳ ин навовариҳои ҷасур, ҷустуҷӯи сахт ва ҷамъоварии бойи барқ дар соҳаи технология. L08 аввалин маҳсулоти аризаи ултрасадои Christiance Conduction мебошад. Ширкат маҳсулоти бештарро дар асоси роботи зериобӣ дар зери об дар зериобӣ пешгирӣ мекунад.
Дар оянда, бо тарғиби роботҳои зериобӣ, ба сенсорҳои ошкоро асосноканд, зеро дастгирии калидии ҳассоси роботҳои зериобӣ албатта ба саноати работ ва майдони ғизоӣ ворид мешаванд.
Вақти почта: ug-04-2023